IT-Technik in der Medizin am Beispiel der Computerassistierten Chirurgie
Die Lebenserwartung der Bevölkerung in Deutschland hat sich in den letzten 50 Jahren von ca. 70 Jahren auf ca. 80 Jahre erhöht. Diese Entwicklung hat selbstverständlich diverse Gründe. Nicht von der Hand zu weisen ist hierbei der Anteil, welcher der Weiterentwicklung medizinischer Standards zugeschrieben werden kann. Insbesondere bei Operationen kann mittlerweile auf Techniken zurückgegriffen werden, welche vor einigen Jahrzehnten noch undenkbar waren.
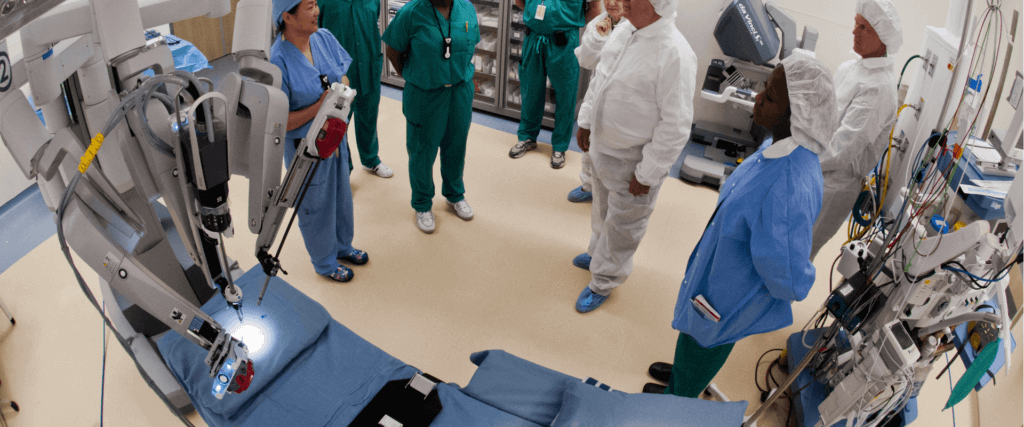
Eine davon ist die Computerassistierte Chirurgie (CAS). Diese umfasst die Bildgeführte Chirurgie, die Chirurgische Navigation sowie die Robotergestützte Chirurgie. Diese Methoden wurden entwickelt, um während der Operation von dem Chirurgen genutzt werden zu können und um eine für den Patienten besonders schonende Behandlung zu gewährleisten. Insbesondere in den Disziplinen der Kopfchirurgie haben sich diese Methoden bereits größtenteils durchgesetzt.
Präoperative Anwendung
Bei der CAS werden präoperativ bildgebende Techniken (u.a. MRT, CT, PET etc.) eingesetzt, um ein möglichst exaktes Modell des Operationsgebietes zu erstellen. Hierbei ist es aufgrund der unterschiedlichen Dichte der einzelnen Gewebearten möglich, einzelne Strukturen zu unterscheiden, wo ältere 2D-Verfahren (z.B. Röntgen), aufgrund der Überlagerung der Schichten, in ihrer Aussagekraft stark eingeschränkt waren.
Die durch unterschiedliche Verfahren erhaltenen Dateien können mit Hilfe von Software zur Darstellung und Verarbeitung von Bilddaten (u.a. OsiriX) mittels Datenfusion zu einem virtuellen 3D-Modell zusammengefügt werden. Aufgrund der unterschiedlichen Dichte können nun relevante Partien des Körpers (z.B. Knochen) hervorgehoben werden, die für die Operation relevant sind. Das 3D-Modell ermöglicht eine millimetergenaue Einsicht in die Gewebestrukturen, wodurch eine genaue Analyse des Krankheitsbildes und die damit einhergehende Planung des Eingriffes und Risikoanalyse um ein Vielfaches erleichtert werden. Zudem können im Vorfeld Simulationen des Eingriffs durchgeführt werden, welche u.a. mögliche Einstiegspunkte des Chirurgen umfassen, und somit ein optimales Vorgehen während der eigentlichen Operation gewährleisten.
Die erhaltenen Daten sind unumgänglich, um chirurgische Roboter im Vorfeld zu programmieren, welche den menschlichen Chirurgen unterstützen oder komplett ersetzen.
Robotergestützte Chirurgie
Die Robotergestützte Chirurgie kann in drei verschiedene Anwendungsbereiche unterteilt werden. So wird bei einem Aufsichtsgesteuerten System die gesamte Operation von dem Roboterarm durchgeführt, welche zuvor programmierte Befehle ausführt. Bei der Telechirurgie ist der Chirurg in der Lage, den Roboter direkt während der Operation zu programmieren und somit auf auftretende Komplikationen zu reagieren ohne selber den Patienten zu operieren. Die dritte Anwendungsmöglichkeit ist die, in der der Chirurg mittels Handsteuerung den Roboter lenkt und dieser somit keine programmierten Befehle erhält. Dies hat u.a. den Vorteil, dass der Roboterarm, anders als der Mensch, mit Mikroinstrumenten arbeiten kann, welche eine größtmögliche Schonung des Patienten garantieren.
Intraoperative Anwendung
Das zuvor erhaltene Modell ermöglicht eine wesentlich vereinfachte intraoperative Navigation, welche mit dem Navigationsgerät eines Fahrzeugs vergleichbar ist. Hierbei muss jederzeit sichergestellt sein, dass der zuvor erhaltene Datensatz mit den tatsächlichen Gegebenheiten des Patienten übereinstimmen. Hierfür werden Referenzpunkte verwendet, welche sowohl im Datensatz auffindbar als auch direkt am Patienten identifizierbar sein müssen. Es müssen mindestens drei Punkte vorhanden sein, welche nicht in einer Ebene liegen dürfen. Zu Beginn der Operation werden diese Punkte nacheinander angetastet und mit den Bilddaten digitalisiert. Diesen Vorgang bezeichnet man als Referenzierung. Mit Hilfe dessen kann die permanente und exakte Darstellung des Operationsinstrumentes in dem Modell gewährleistet werden, was auch als Chirurgische Navigation bezeichnet wird. Der Chirurg kann somit kleinere Schnitte anwenden, um an die betroffenen Stellen zu gelangen, da er keinen direkten Sichtkontakt zu den betroffenen Regionen benötigt. Dem Chirurgen können zudem über den Monitor Zusatzinformationen eingeblendet werden, welche er während der Operation nutzen kann.
Postoperative Anwendung
Die zuvor angefertigten Simulationen können als Soll-Zustand mit dem tatsächlichen Zustand des Patienten verglichen werden. Fehlerquellen können somit leichter ermittelt und für zukünftige Operationen in die Planung mit eingebunden werden.
Kritik der CAS
Gegenüber den herkömmlichen Operationsverfahren bietet die Computerassistierte Chirurgie vor allem den Vorteil der Patientenschonung. Krankheitsbilder können ungemein genauer bestimmt und die Therapie auf eben jene abgestimmt werden. Risiken, welche bei der Operation auftreten können, werden minimiert bzw. im Vorfeld kalkulier- und simulierbar gemacht. Kleinere Operationsnarben beugen diversen Infektionskrankheiten vor und ermöglichen eine schnellere Wiederkehr des Patienten in seinen Alltag. Demgegenüber stehen insbesondere ethische Bedenken. Diese bestehen größtenteils in der Tatsache, dass durch die Weiterentwicklung der Roboter nicht zu kalkulierende Risiken für den Patienten auftreten können.
Rückmeldungen